
仿生机械臂
本系列仿生机械臂采用全AI驱动架构,面向高精度、高复杂度工业场景设计,融合先进的运动控制算法与大 模型能力,实现从“自动化执行"向“智能决策执行"的跃迁, 产品具备7自由度设计,支持类人运动轨迹与复杂操作任务,广泛适用于生产制造、智慧物流、医疗辅助. 航空航天及特种作业等场景。 系统采用高精度、高刚性摆线一体化关节模组,结合NVIDIA Jetson Orin/Thor AI主控平台,具备强大的感 知、决策与控制能力,支持用户灵活配置与二次开发,满足多样化商业应用需求。

Applications
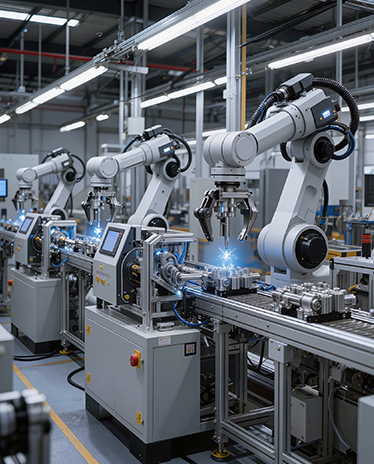
工业自动化

智能物流

特种作业
Key Advantages
基于 AI 原生架构打造,系统支持多模态模型融合,并可实现视觉、力觉与运动控制的协同融合,满足复杂任务执行需求。
采用 7 自由度仿生设计,可实现类人运动能力,具备更高灵活性,并能在复杂及狭小空间中稳定可靠运行。
高精度摆线一体化关节,具备高刚性、低回差和稳定性能,可满足重载、长时间连续运行需求。
搭载 NVIDIA Jetson Orin / Thor 平台,具备强大的边缘 AI 算力,可支持实时决策与先进算法运行。
模块化可重构设计,部署更灵活,支持不同负载方案灵活配置,同时兼顾快速部署与系统高效集成。
支持 EtherCAT 通信、SDK/API 接口,并兼容主流自动化系统,具备开放性、可扩展性,且易于集成。
Specifications
| 参数 | S3 | S5 | S8 | S15 | S25 |
|---|---|---|---|---|---|
| 负载 | 3kg | 5kg | 8kg | 15kg | 25kg |
| 自由度 | 7DOF | 7DOF | 7DOF | 7DOF | 7DOF |
| 最大臂展 | 700mm | 800mm | 900mm | 1100mm | 1300mm |
| 重复定位精度 | ±0.02mm | ±0.02mm | ±0.02mm | ±0.03mm | ±0.05mm |
| 最大TCP速度 | 2.0m/s | 2.0m/s | 1.8m/s | 1.5m/s | 1.2 m/s |
| 关节扭矩范围 | 15–75Nm | 30–150Nm | 75–300Nm | 150–500Nm | 300–500Nm |
| 控制器 | Jetson Orin | Jetson Orin | Jetson Orin | Orin / Thor | Thor |
| 通信方式 | EtherCAT | EtherCAT | EtherCAT | EtherCAT | EtherCAT |
| 防护等级 | IP54 | IP54 | IP54 | IP54 | IP54 (IP65 Optional) |
| 典型功率 | 0.5kW | 0.8kW | 1.2kW | 2.0kW | 3.5kW |
| 安装方式 | 台面/倒装 | 台面/倒装 | 台面/倒装 | 台面/地装 | 地装 |
| 应用场景 | 精密作业 | 电子制造 | 通用自动化 | 工业搬运 | 重载/特种作业 |